![]()
dr.-ing. robert kovacs
R&D Mechatronics · Haptics · Robotics · Fabrication Systems

I’m a mechatronics design engineer and researcher. My work revols around designing intelligent mechanisms, digital fabrication, circuit design, and robotics.
Available for R&D, advanced prototyping, haptics, robotics, physical AI, and developing hardware-product concepts.
currently: postdoctoral researcher @Freie Universität Berlin
previously: Hasso Plattner Institute, Microsoft Research intern, Interactive-Scape
contact
mail [at] robertkovacs.de
scholar | acm dl | linkedin | orcid | github
phd thesis:
human-scale personal fabrication
–
from desktop tools to load-bearing kinetic structures
(4 full papers)
advised by prof. Patrick Baudisch at the Hasso Plattner Institute - Human Computer Interaction lab.PDF (DOI:https://doi.org/10.25932/publishup-55539)

Trusscillator: a System for Fabricating Human-Scale Human-Powered Oscillating Devices
ACM UIST’21Robert Kovacs, Lukas Rambold, Lukas Fritzsche, Dominik Meier, Jotaro Shigeyama, Shohei Katakura, Ran Zhang, Patrick Baudisch Trusscillator is an end-to-end system that allows non-engineers to create human-scale human-powered devices that perform oscillatory movements, such as playground equipment, workout devices, and interactive kinetic installations.
Best Demo Honorable Mention Award
TrussFormer: 3D Printing Large Kinetic Structures
ACM UIST’18Robert Kovacs, Alexandra Ion, Pedro Lopes, Tim Oesterreich, Johannes Filter, Philip Otto, Tobias Arndt, Nico Ring, Melvin Witte, Anton Synytsia, and Patrick Baudisch TrussFormer is an integrated end-to-end system that allows users to 3D print large-scale kinetic structures, i.e., structures that involve motion and and are subject to inertial forces.
CHI’19 Best Visual Communication Award

TrussFab: Fabricating Sturdy Large-Scale Structures on Desktop 3D Printers
ACM CHI’17Robert Kovacs, Anna Seufert, Ludwig Wall, Hsiang-Ting Chen, Florian Meinel, Willi Müller, Si-jing You, Maximilian Brehm, Jonathan Striebel, Yannis Kommana, Alexander Popiak, Thomas Bläsius, and Patrick Baudisch TrussFab is an integrated end-to-end system that allows users to fabricate large scale structures that are sturdy enough to carry human weight. TrussFab achieves the large scale by complementing 3D print with plastic bottles.Protopiper: Physically Sketching Room-Sized Objects at Actual Scale
ACM UIST ‘15Harshit Agrawal, Udayan Umapathi, Robert Kovacs, Johannes Frohnhofen, Hsiang-Ting Chen, Stefanie Mueller, Patrick Baudisch Protopiper is a computer aided, hand-held fabrication device that allows users to sketch room-sized objects at actual scale. The key idea behind protopiper is that it forms adhesive tape into tubes as its main building material, rather than extruded plastic or photopolymer line.
UIST Best Demo Award
internship @Microsoft_Research

Haptic PIVOT: On-Demand Handhelds in VR
ACM UIST’20Robert Kovacs, Eyal Ofek, Mar Gonzalez Franco, Alexa Fay Siu, Sebastian Marwecki, Christian Holz, Mike Sinclair
PIVOT is a wrist-worn haptic device that renders virtual objects into the user’s hand on demand. Its simple design comprises a single actuated joint that pivots a haptic handle into and out of the user’s hand, rendering the haptic sensations of grasping, catching, or throwing an object – anywhere in space.
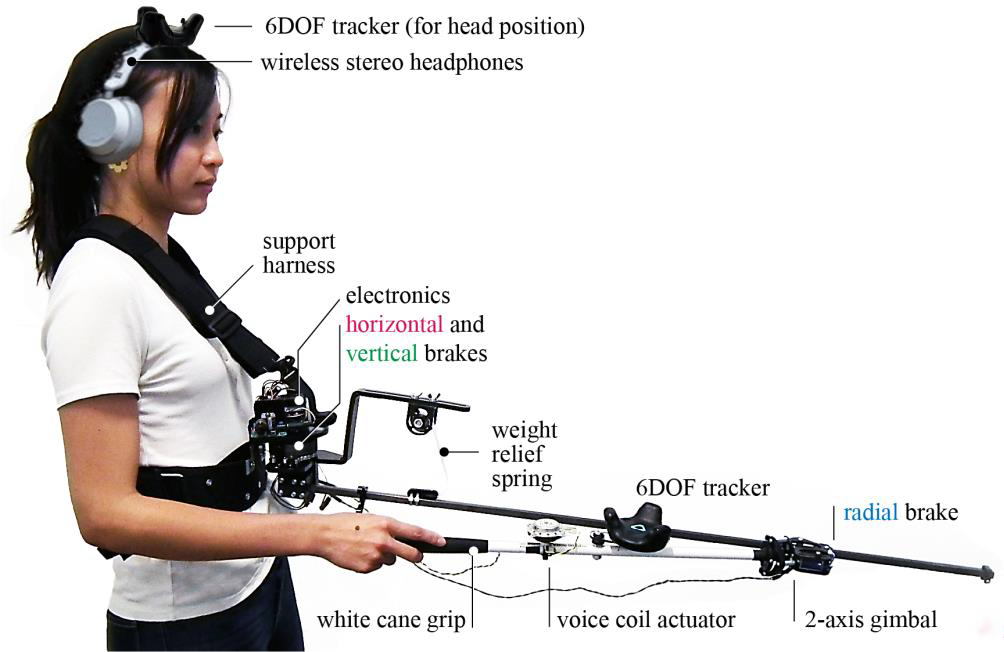
Virtual Reality Without Vision: A Haptic and Auditory White Cane to Navigate Complex Virtual Worlds
ACM CHI‘20 (best paper honorable mention)collaborative robotics

LEROSH: training robots for crafts
(at interactive-scape & werk5) The Lerosh project is about exploring how machine learning can help artisans to work with collaborative robots on unique artifacts. In particular, training robots with the "master's movements" that can be later generalized to any object, geometry, or material. The key challenge here is to extract the high-level skills from the craftsman's demonstration and to replicate the fine-motoric movements using multi-sensory feedback loops. project page: LEROSH.deinflatable truss structures

AirForce: Personal Fabrication of Large-Scale, Load-Bearing Animatronics Structures from a Single Tube
ACM CHI’26Lukas Rambold, Robert Kovacs, Min Deng, Antonius Nauman, Konrad Gerlach, Horatio Montero Hamkins, Helena Lendowski, Chiao Fang, Shohei Katakura, Conrad Lemper, Muhammad Abdullah, Patrick Baudisch AirForce is a fabrication system that enables users to create large, load-bearing animated structures from a single continuous tube. It replaces traditional truss elements with folded tube segments and integrates pneumatic actuators into the same tube, enabling full structures to be built, animated, unfolded, and refolded with 100% material reuse. The system introduces three intergrated variants of pneumatic actuators: Buckling actuators for long push motions, Muscle actuators for pulling, Telescoping actuators for high-force output.
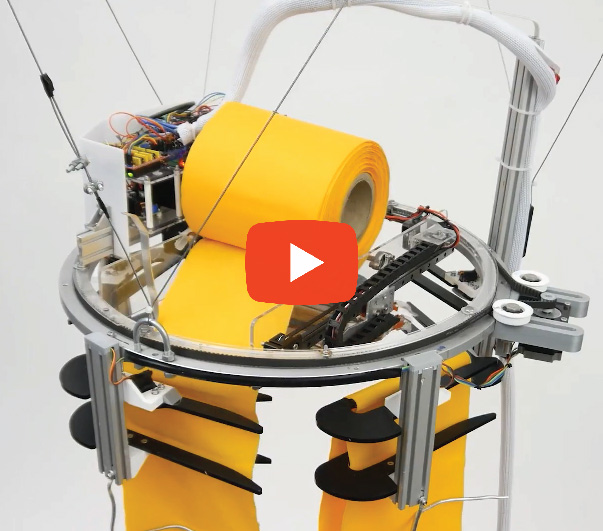
AirTied: Automatic Personal Fabrication of Truss Structures
ACM UIST’23Lukas Rambold, Robert Kovacs, Conrad Lempert, Muhammad Abdullah, Helena Lendowski, Lukas Fritzsche, Martin Taraz, and Patrick Baudisch AirTied is a device that fabricates truss structures in a fully automatic fashion. AirTied achieves this by unrolling a 20cm-wide inflatable plastic tube and tying nodes into it. AirTied creates nodes by holding onto a segment of tube, stacking additional tube segments on top of it, tying them up, and releasing the result. The resulting structures are material-efficient and light as well as sturdy, as we demonstrate by creating a 6m-tower. Unlike the prior art, AirTied requires no scaffolding and no building blocks, bringing automated truss construction into the reach of personal fabrication.
metamaterial mechanisms

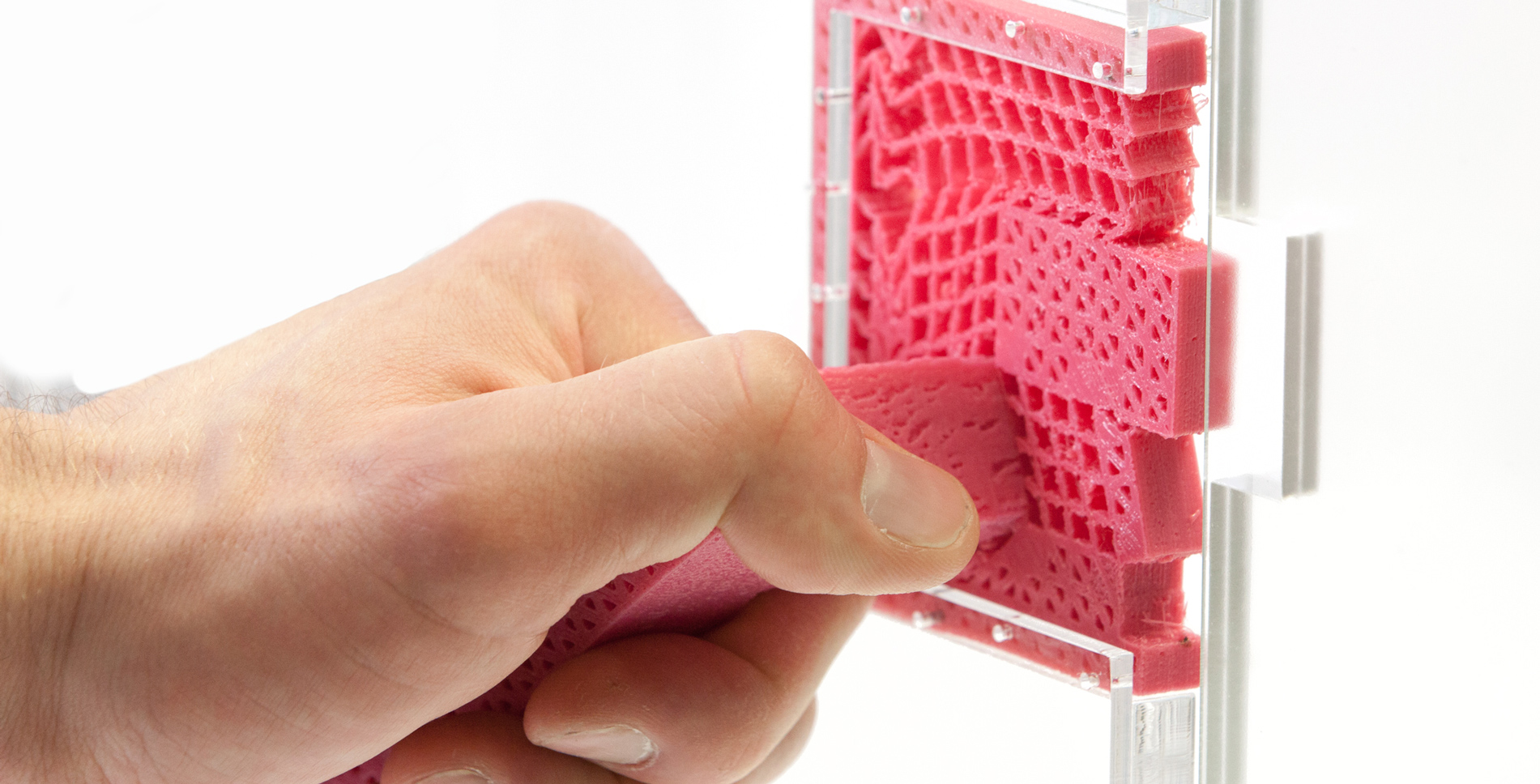
Metamaterial Textures
ACM CHI‘18Alexandra Ion, Robert Kovacs, Oliver S. Schneider, Pedro Lopes, and Patrick Baudisch Metamaterial textures are 3D printed surface geometries that can perform a controlled transition between two or more textures. Metamaterial textures are integrated into 3D printed objects and allow designing how the object interacts with the environment and the user’s tactile sense.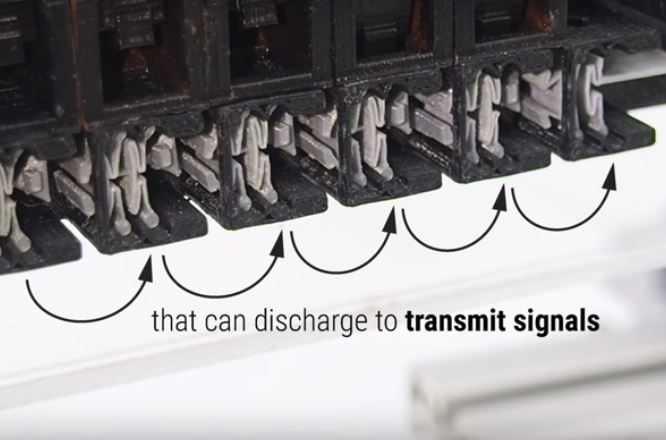
Metamaterial Mechanisms
ACM UIST ‘16 (best paper honorable mention)Alexandra Ion, Johannes Frohnhofen, Ludwig Wall, Robert Kovacs, Mirela Alistar, Jack Lindsay, Pedro Lopes, Hsiang-Ting Chen, and Patrick Baudisch So far, metamaterials were understood as materials—we want to think of them as machines. We demonstrate metamaterial objects that perform a mechanical function.
laser-cutting and fabrication

Kerfmeter: Automatic Kerf Calibration for Laser Cuting
ACM CHI‘23 Shohei Katakura, Martin Taraz, Muhammad Abdullah, Paul Methfessel, Lukas Rambold, Robert Kovacs, and Patrick Baudisch Kerfmeter is a hardware + software device that automatically determines how much material the laser cutter burns off, also known as kerf. Its knowledge about kerf allows Kerfmeter to make the joints of laser cut 3D models fit together with just the right tension, i.e., loose enough to allow for comfortable assembly, yet tight enough to hold parts together without glue—all this without user interaction.ACM publication page
Fastforce: Real-Time Reinforcement of Laser-Cut Structures
ACM CHI‘20Muhammad Abdullah, Martin Taraz, Yannis Kommana, Shohei Katakura, Robert Kovacs, Jotaro Shigeyama, Thijs Roumen, and Patrick Baudisch
fastForce is a software tool that detects structural flaws in laser cut 3D models and fixes them by introducing additional plates into the model. It fixes structural issues in real-time, while users stay focused on editing their models and without ever becoming aware of any structural issues.
ACM publication page

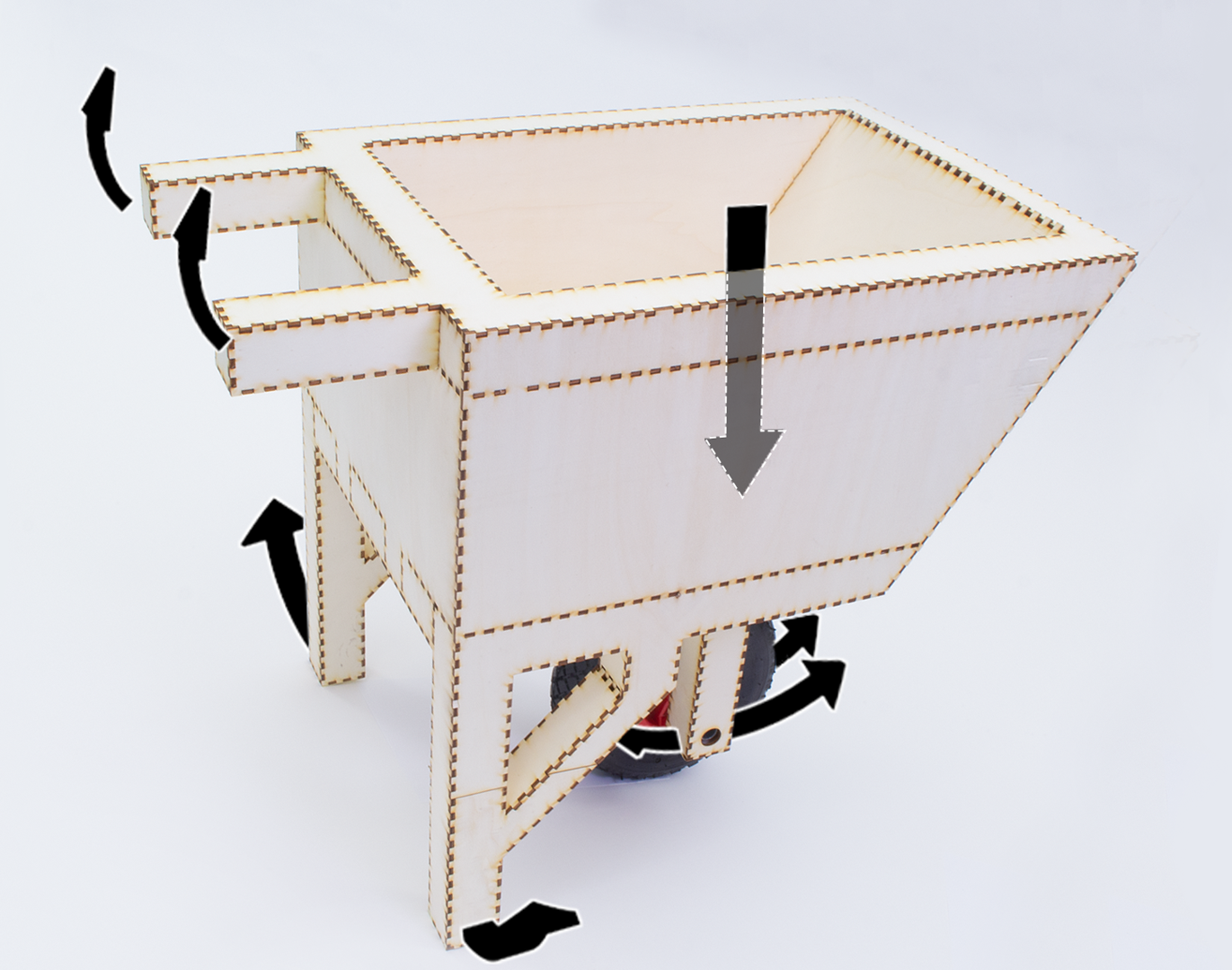
Kyub: a 3D Editor for Modeling Laser-Cut Objects
ACM CHI‘19 Patrick Baudisch , Arthur Silber, Yannis Kommana, Milan Gruner, Ludwig Wall, Kevin Reuss, Lukas Heilman, Robert Kovacs, Daniel Rechlitz, and Thijs Roumen Kyub is an interactive editing system for laser cutting. Unlike earlier systems, kyub affords constructing closed box structures by stacking cubic shaped primitives –boxels. This interaction provides the strong affordance and ease of use of a voxel-based editor, while building with boxels ensures the structural stability.
FormFab: Continuous Interactive Fabrication
ACM TEI‘19 Stefanie Mueller, Anna Seufert, Huaishu Peng, Robert Kovacs, Kevin Reuss, François Guimbretière, Patrick Baudisch FormFab is an interactive fabrication system that can change a workpiece’s shape continuously while the user is interacting. This enables users to explore different sizes of a shape with a single interaction rather than in multiple turns. We accomplish this using a process called formative fabrication, which rather than adding or subtracting, reshapes the existing material. In our system, users interactively control a pneumatic air pump that applies either pressure or vacuum to a compliant thermoplastic sheet, thereby pushing the material outwards or pulling it inwards.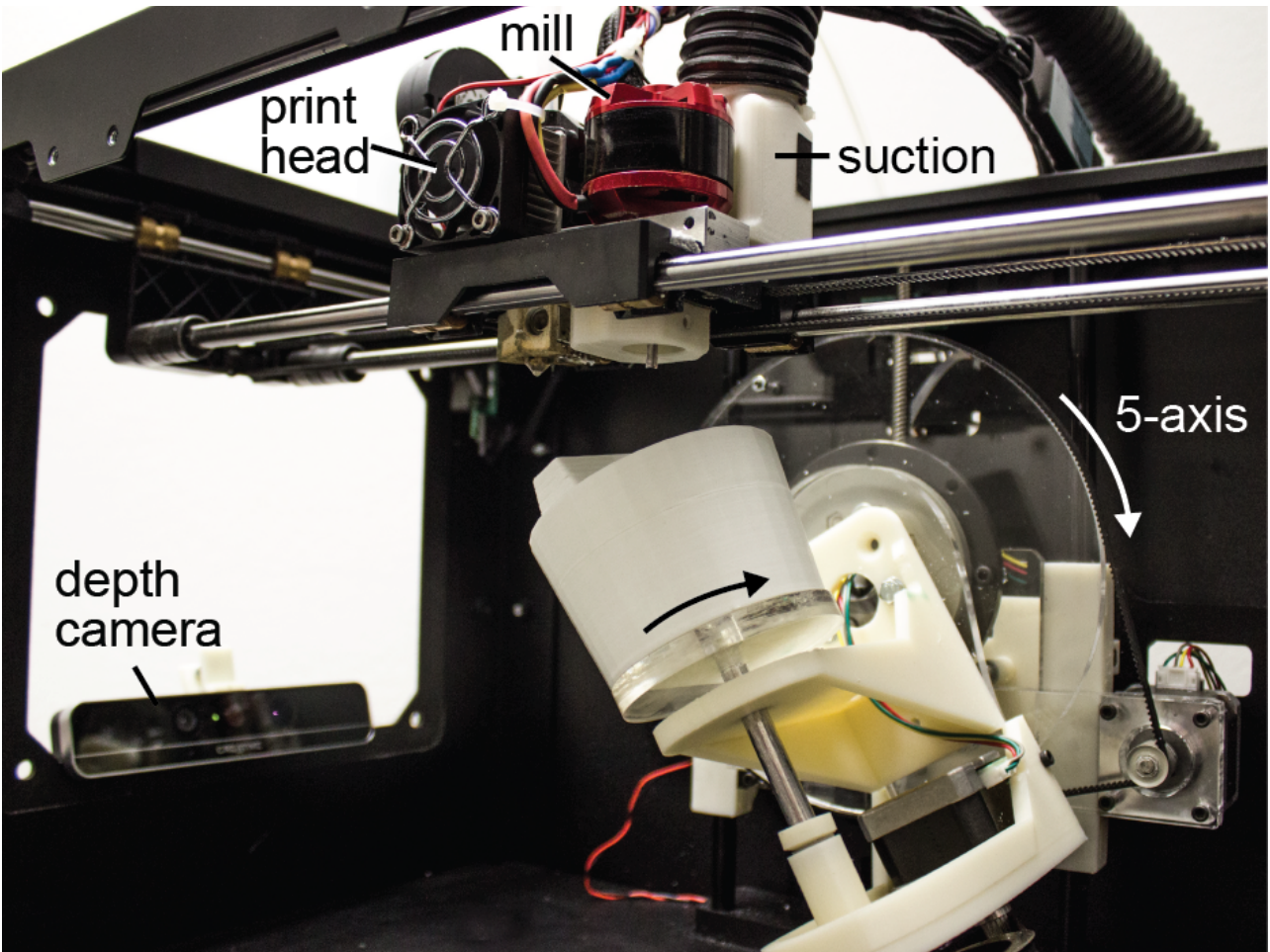
Patching Physical Objects
ACM UIST ‘15Alexander Teibrich, Stefanie Mueller, François Guimbretière, Robert Kovacs, Stefan Neubert, and Patrick Baudisch Personal fabrication is currently a one-way process: once an object has been fabricated with a 3D printer, it cannot be changed anymore. In this paper, we propose a different approach: instead of re-printing the entire object from scratch, we suggest patching the existing object to reflect the next design iteration.
haptic interfaces for blind users

DualPanto: a Haptic Device That Enables Blind Users to Continuously Interact with Virtual Worlds
ACM UIST‘18 Oliver Schneider, Jotaro Shigeyama, Robert Kovacs, Thijs Jan Roumen, Sebastian Marwecki, Nico Boeckhoff, Daniel Amadeus Gloeckner, Jonas Bounama, Patrick Baudisch DualPanto is a haptic device that enables blind users to continuously track the absolute position of moving objects in spatial virtual environments, as is the case in sports or shooter games.
Linespace: a Sense Making Platform for the Blind
ACM CHI‘16 Saiganesh Swaminathan, Thijs Roumen, Robert Kovacs, David Stangl, Stefanie Mueller, Patrick Baudisch Linespace is a tactile display system for blind users. The foundation of our system is a large 140x100cm display area, on which the system creates raised tactile lines with the help of a 3D printer. The foot switch allows users to enter text and issue commands by talking to the computer.haptic feedback in virtual reality

Level-Ups: Motorized Stilts that Simulate Stair Steps in Virtual Reality
ACM CHI‘16 (note paper) Dominik Schmidt, Robert Kovacs, Vikram Mehta, Udayan Umapathi, Sven Köhler, Lung-Pan Cheng, Patrick Baudisch “Level-Ups” are computer-controlled stilts that allow virtual reality users to experience elevation in real-walking environment.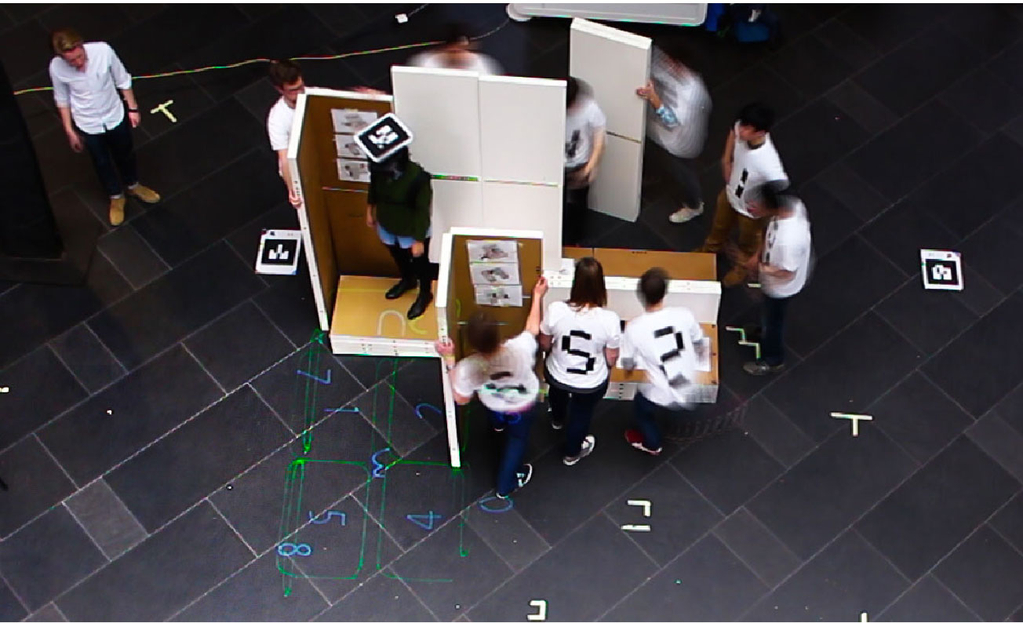
TurkDeck: Physical Virtual Reality Based on People
ACM UIST‘15 Lung-Pan Cheng, Thijs Roumen, Hannes Rantzsch, Sven Köhler, Patrick Schmidt, Robert Kovacs, Johannes Jasper, Jonas Kemper, and Patrick Baudisch TurkDeck is an immersive virtual reality system that reproduces not only what users see and hear, but also what users feel. TurkDeck creates these physical representations on the fly by making a group of human workers present and operate the props only when and where the user can actually reach them.
cyber security
PLC Guard: A Practical Defense Against Attacks on Cyber-Physical Systems
IEEE CNS‘15 Jan-Ole Malchow, Daniel Marzin, Johannes Klick, Robert Kovacs, and Volker Roth Adversaries can then analyze and modify the code and load it back onto the PLC in order to perform sabotage. This process can be performed online or it can be automated by means of malware that infects engineering workstations, similar to Stuxnet.
art collaborations

ad infinitum: a parasite that lives off human energy
Ars Electronica Linz & Science Galery DoublinPedro Lopez, Robert Kovacs, Alexandra Ion, David Lindlbauer, and Patrick Baudisch
Ad infinitum is a parasitical entity which lives untethered and off the grid. This parasite reverses the dominant role that mankind has with respect to technologies: the parasite shifts humans from “users” to “used” .

pendulum tuning
Museum Kiscell, Budapest, HungaryTurcsany Villő - artist
Robert Kovacs - motion system
The installation makes an attempt to change the personal perception of time. Four kinetic sculptures are suspended at the highest point of the temple space, allowing them to make pendulum movement. Their design represents advancement against the physical drag. The pendulums’ paths develop a moving structure and create a rhythm; they are constantly changing and thus re-tuneing the space of the viewer.